Reborn Flywheel for RFM
Why Robotics Can’t Leap to AGI Directly
Despite rapid progress in hardware, LLM and simulation, today's robotics models remain narrow, overfit, and fragmented. Each company develops isolated solutions for specific tasks or hardware, and the field lacks:
Sufficient high-quality, real-world data
Scalable training pipelines
A shared model layer that generalizes across settings
Without solving these bottlenecks, the field cannot leap directly into training general-purpose AGI robots.
The Reborn Roadmap to AGI Robot
Reborn’s pathway toward Robotic Foundation Models (RFMs) is rooted in a bottom-up, data-centric methodology. Instead of attempting to train a general-purpose AGI model from the outset, Reborn adopts a progressive, scalable strategy that begins with community participation and culminates in high-performance vertical-domain applications.
1. Building Data Foundation with Reborn Data Collection Framework
The process begins with large-scale human participation. Through Rebocap™ motion capture, VR interaction, and first-person video recording via smartphones, Reborn mobilizes users worldwide to contribute multimodal data. This grassroots approach ensures an unmatched level of diversity, realism, and contextual variety, setting the foundation for generalizable embodied intelligence.
2. Training Core Embodied Control Models
With this data, Reborn first trains general-purpose control and perception models, focusing on:
Human locomotion and full-body pose estimation
Hand-object interaction and fine manipulation
Basic task decomposition and sequential motor planning
These models form the core building blocks of embodied intelligence—modular capabilities that can be adapted across robot types and environments.
3. Co-building Vertical Domain Applications
Once foundational skills are established, Reborn collaborates with leading humanoid robot manufacturers such as Unitree and Booster Robotics to jointly develop vertical-specific application models. These include:
Domestic assistance (navigation + grasping)
Industrial collaboration (human-robot coordination)
Interactive education or service robots
Reborn provides the algorithmic and data-driven model architecture, while partners contribute hardware platforms, deployment environments, and real-world feedback—accelerating the integration of AI into functional, market-ready robots.
4. Deployment-Driven Iteration
As these models are deployed in physical and virtual environments, they generate real-time interaction data and behavioral edge cases, which are fed back into the training cycle. This continuous feedback loop enhances both model robustness and generalizability, pushing the system closer to the long-term goal of autonomous, general-purpose RFMs.
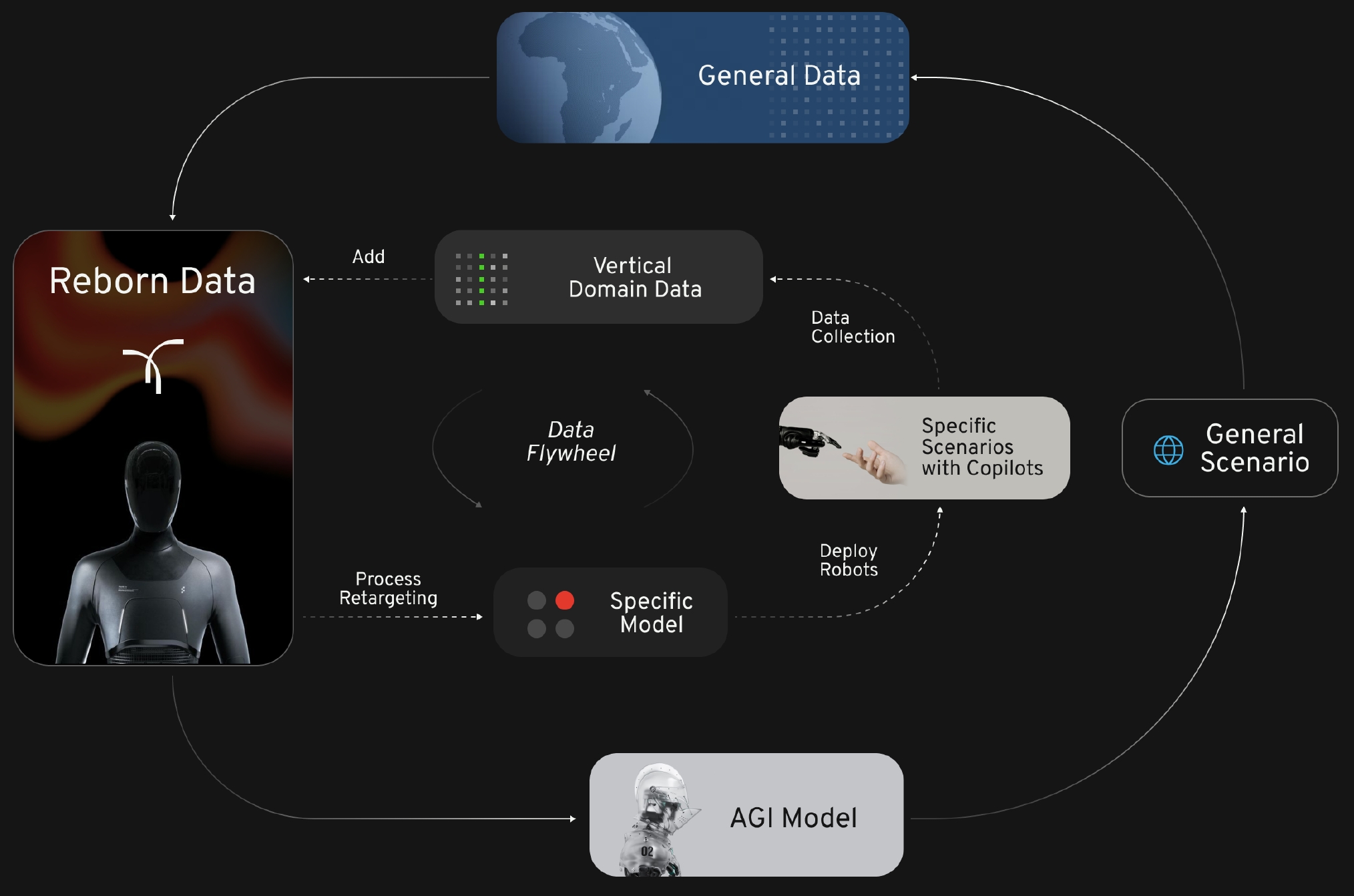
This iterative pipeline forms the backbone of the Reborn Flywheel:
Global Data Collection → Core Model Training → Vertical Deployment → Real-World Feedback → Model Refinement → Toward RFMs
Each cycle drives progress—expanding the model’s capabilities, enriching the data, and reducing the gap between specialized robotics and true embodied AGI.